



Autoguidage : ce soir je réalise quelques tests d’autoguidage. J’ai bricolé une installation me permettant de fixer la lunette skylux 70/700 pour réaliser les tests d’autoguidage. Avec des velcros, j’ai attaché la lunette sur le dos du Meade LX200. Après avoir bien serré les velcros, la lunette est bien rigide. Je télécharge GuideMaster avec le plug’in DMK et je test l’installation. Coté informatique, tout semble OK.
La mise au point n’est pas simple, mais malgré une installation artisanale pour la lunette guide, j’atteints des résultats au-delà de mes espérances. Je réalise plusieurs séries sur la nuit sur M42 et Flame Nebula NGC 2024. Je positionne le réducteur Meade 6.3 au foyer du télescope puis mon focuser Meade avec l’EOS.
Je réalise des poses unitaires de 5 minutes (300 secondes) et 800ISO. Pour quel résultat ? Techniquement, je suis content car je vais pouvoir faire du ciel profond. Qualitativement, les images sont médiocres sans fausses modesties. Le réducteur pourri l’image. Des plus la mise au point n’est pas non plus la meilleur du monde. Je pense que je dois réduire le temps de pose ou les ISO. Je vais réessayer au foyer directement car les résultats étaient très bon.

AVEC autoguidage – EOS 300D au foyer du LX200-203mm – Pose de 120 secondes à 800ISO. 
Sans autoguidage – EOS 300D au foyer du LX200-203mm – Pose de 120 secondes à 800ISO.
Voici les premiers tests d’autoguidage.
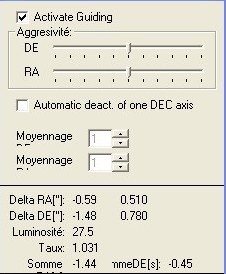
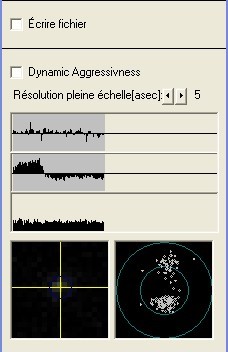
L’objectif se trouve dans la cible à gauche Il faut que les points « s’allument » dans la cible. Un maximum de point doit se trouver au milieu de la cible. Pour vérifier, on enregistrer les mesures. Le logiciel mesure les erreurs RA/DE dans un fichier.
Pour lire ce fichier avec l’outil PEAS, il faut d’abord traiter le fichier des données qui se trouvent dans le répertoire du programme (xx.dat). Il faut l’ouvrir avec Excel (importer en format text, choisir le séparateur « espace », puis quand l’importation est terminée, conserver uniquement les colonnes (Timer, RA-error, DE-error) et supprimer la ligne des titres. Ensuite l’enregistrer en format text et le renommer en fichier .dat.
L’ouvrir avec PEAS sous le format Astrosnap.
En analysant les résultats, on constate qu’il y a un problème en DEC. Je réalise donc une série de tests pour enfin trouver une configuration corrigeant l’amplitude de cette erreur.


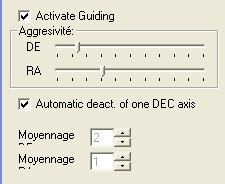
2ème essai de la soirée et affinage des paramètres
Je décide de jouer avec 2 paramètres : l’agressivité et la moyenne (DE/RA).
Agressivité : Il s’agit de l’intensité de la correction. Le programme calcule, le moment et la durée des impulsions de correction, pour aller de la position actuelle à la position cible. Avec 100% le déplacement se ferait en une seule fois, mais comme les vecteurs ont toujours une petite erreur, et aussi parce que le seeing a une influence, utiliser toujours une agressivité plus petite. Choisissez donc une agressivité pas trop forte, sinon votre système se mettra à osciller. La valeur va de 0 a 100.
Moyenne DEC / Moyenne AD : on définit ici sur combien d’images de la webcam est calculée la moyenne servant à calculer la position. Le moyennage démarre de suite. Ne pas moyenner est équivalent à « 1 ».
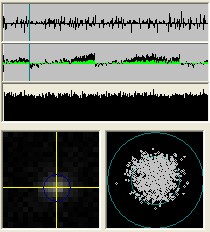
Je fixe l’agressivité vers 20/25% en E. Après quelques tests : augmentation et diminution, je fixe cette valeur. Je vois la courbe s’aplanir et l’ensemble des points restent dans la cible. Le temps d’exposition est augmenter à 2.5secondes car l’étoile guide n’est pas très lumineuse.
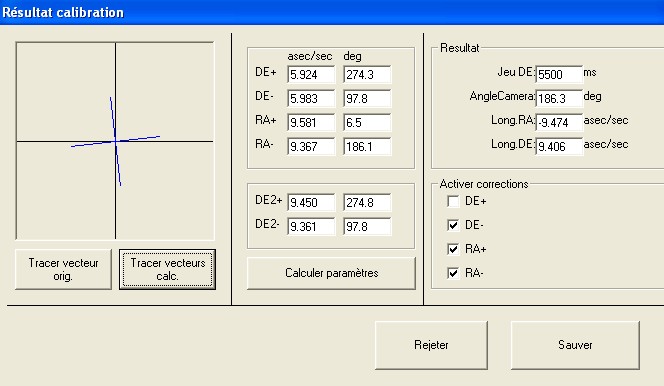
La calcul de calibrage permet au logiciel de s’y retrouver quand il commande la télescope avec la webcam. On voit sur la cible à gauche, le décalage par rapport à l’axe. Le jeu en déclinaison est énorme…. il faut que je regarde pourquoi. Autre point, j’ai réajusté l’équilibrage. Il est aussi conseillé de désactiver les corrections sur un des 2 axes DE+ ou DE-.

